位置传感器在机器人关节伺服系统中对于获取机械位置是必不可少的,然而它们的安装不可避免地占据了轴向空间并增加了系统的复杂性,这就限制了它们在紧凑机器人设计中的应用,在紧凑机器人设计中,空间约束和集成效率是至关重要的。无传感器控制通过硬件简化来降低机械和电路复杂性,但本质上仅估算电气而非机械转子位置信息,因此在机器人关节控制应用方面仍受到限制。基于之前提出的双间隙双极复合电机(DDCM),本文系统地分析了机械位置估计误差产生的原因,并提出了一种利用校正系数来减少这些误差并提高估计精度的校正方法。此外,本文推导了所提出方案的适用性约束,证明其对电角位置误差的要求并不严格,从而在传统的无传感器控制场景中具有广泛的适用性。通过在0.75 kW原型上进行实验,验证了所提出方法的有效性。
Position sensors are indispensable in robotic joint servo systems for acquiring mechanical positions, yet their installation inevitably occupies an axial space and increases system complexity, limiting their applicability in compact robot design where spatial constraints and integration efficiency are critical. Sensorless control reduces mechanical and circuit complexity through hardware simplification, but inherently estimates only the electrical instead of mechanical rotor position information, thus remaining constrained in robot joint control applications. Based on the previously proposed dual-gap dual-pole composite machine (DDCM), this paper systematically analyzes the causes of mechanical position estimation errors and proposes a correction method that utilizes a correction coefficient to reduce these errors and enhance estimation accuracy. Furthermore, this paper derives the applicability constraints of the proposed scheme, demonstrating that its requirements for electrical angle position errors are not stringent, thus enabling wide applicability in conventional sensorless control scenarios. The effectiveness of the proposed method is verified by conducting experiments on a 0.75 kW prototype.
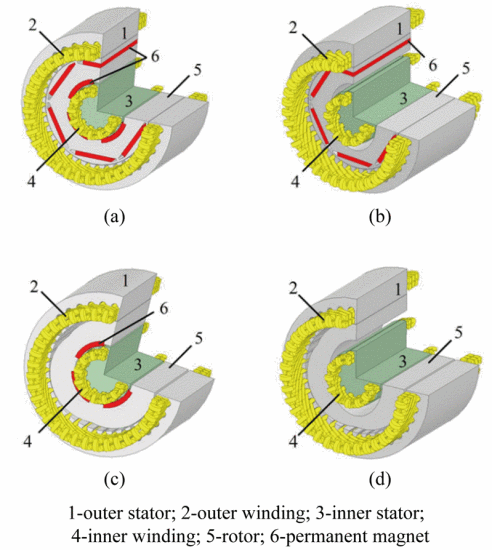
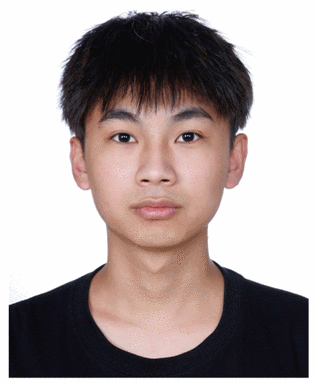
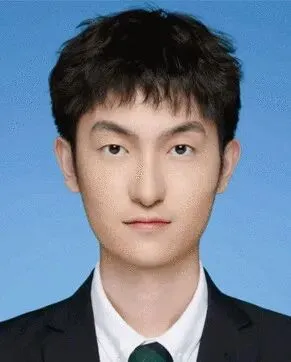
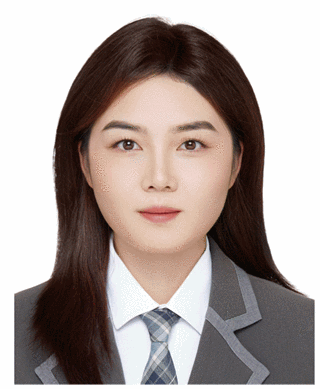
图1 不同拓扑结构的双定子磁通调制电机(DDCM)。(a) 两个气隙均为永磁同步电机(PMSM);(b) 外气隙为永磁同步电机(PMSM),内气隙为磁阻电机(RM);(c) 外气隙为磁阻电机(RM),内气隙为永磁同步电机(PMSM);(d) 两个气隙均为磁阻电机(RM)。